![]()
 |
|
|---|---|
|
材質:発泡材、塗装済み |
|
 |
| 組 立 用 工 具 類 ・ ・ ・ あ れ ば 便 利 な も の 含 む |
 |
   |
|
|---|---|---|---|
   |
|||
| <上段>セメダイン「スーパーX、3Mプラスチック接着剤(通称ねりわさ)、キット付属のプラスチック接着剤 (いずれかの一つで良い) <下段>ねじ固着材、瞬間接着剤、マスキングテープ、テーパーリーマ、ガスコンロなど |
|||
| <サーボテスター> |
 |
||
| *** | |||
| キ ッ ト の 付 属 品 |
 |
 |
|
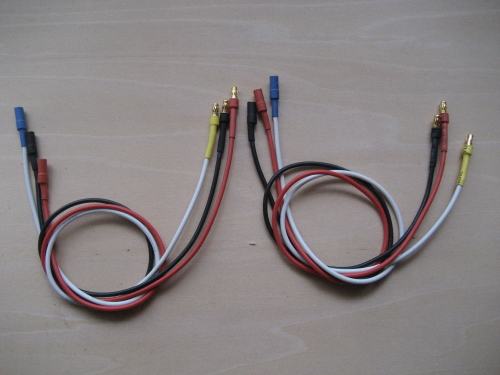
| <サーボ延長ケーブル>40cmx1、30cmx2、20cmx2、Y 30cmx1 | |||
    |
|||
| 左から:水中舵、ミニドライバーと板レンチ、主翼補強用ロッド、主翼固定用ねじ&ワッシャー(M3x45、M3x35各2本) | |||
| ************** | |||
| モ | タ | の 準 備 作 業 |
 |
  |
|
| モーター取付例 左:取り付けには追加工が必要 右:このままで取り付けが可能 |
|||
| モーターの選定 ①上:追加工が必要になるがモーターの種類が多くていろいろ汎用性があるこのタイプのモーターを使用することにした。 ②下:このスティックマウントタイプのモーターであれば、オリジナルのままでモーター取り付け可能 |
|||
 |
 |
||
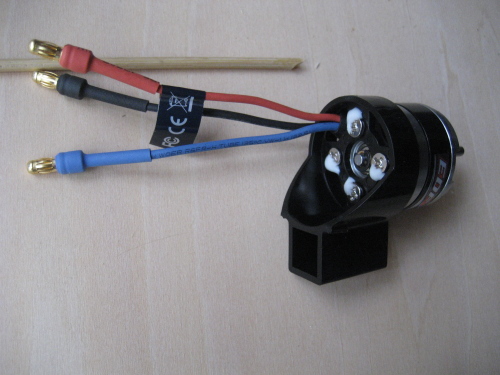
| モーターx2:L2206A-1,650kv (130W) Max17.8A (コレット付) | モーターマウントx2 ”耳”の部分をカットする(右図はカットした状態) |
||
 |
 |
||
| モーターをモーターマウントにねじ止め (モーターマウントに付属のM3ねじを使用) |
ねじのゆるみ止め (目視しやすいように、スーパーX(ホワイト)を使用) |
||
| *** | |||
| モ | タ | 延 長 ケ | ブ ル |
 |
 |
|
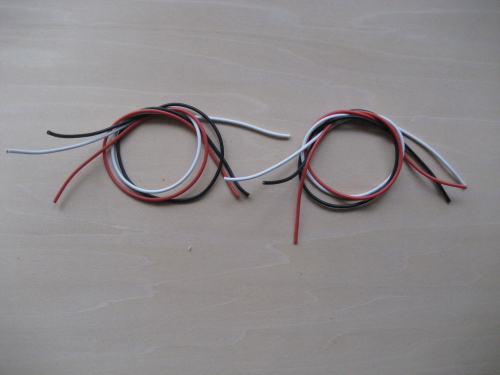
| ・シリコンケーブル0.75sq(AWG18相当) 各40cm 2組製作 | φ3.5mmゴールドコネクター(オス/メス)をはんだ付け 2組製作 収縮スリーブ(φ4mm) |
||
| *** | |||
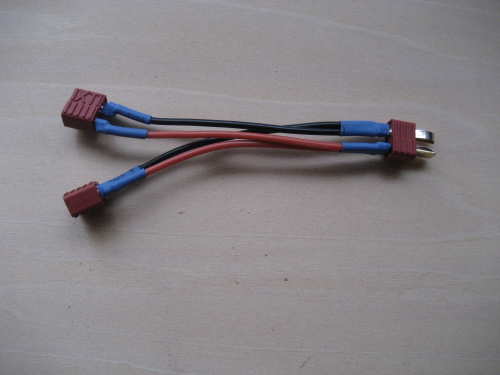
| バ ッ テ リ | 用 Y ケ | ブ ル |
 |
||
| ・シリコンケーブル AWG18 10cm 収縮スリーブ φ4mm | |||
| ア ン プ &B E C の 準 備 作 業 |
 |
 |
|
| <アンプ:20A x2> φ3.5mmゴールドコネクター(メス)をはんだ付けする |
※コネクターの中央ピン(+電源線)を抜き取り絶縁処理する。 |
||
 |
|||
| <BEC: 5A Lipo 2s-7s用 ※Lipo3s用JST-XHコネクターをはんだ付けする |
|||
| プ ロ ペ ラ の 準 備 作 業 |
 |
 |
|
| コレットのサイズに合わせて穴を広げる | |||
| *** | |||
| 翼 端 フ ロ | ト 組 立 |
  |
  |
|
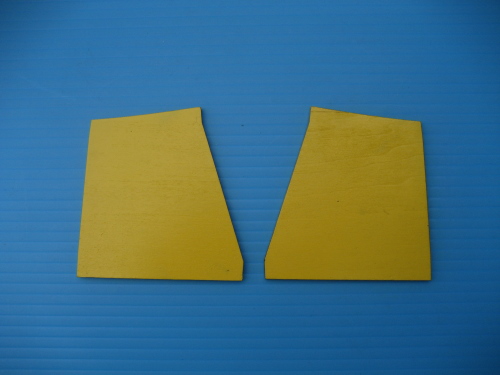
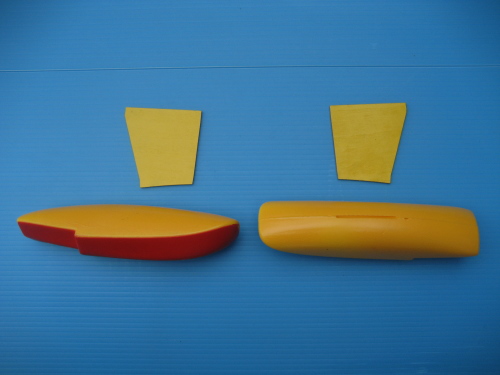
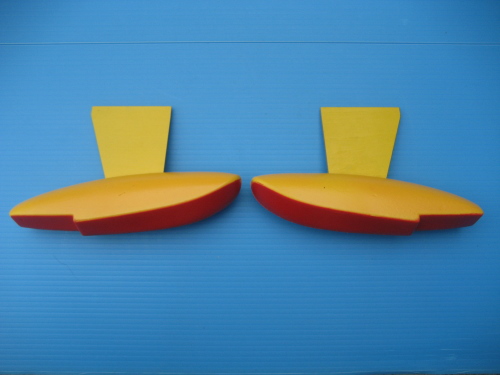
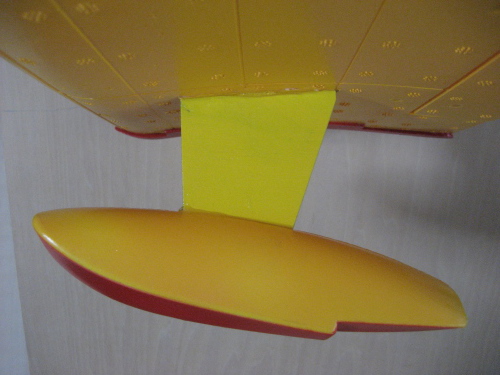
| 取付板を塗装する (イエロー・ラッカースプレー塗装) | 取付板と翼端フロートを接着する (スーパーX、”ねりわさ”、またはキット付属の接着剤使用) |
||
| * ★★ 主翼の組立 ★★ * |
|||
| モ | タ | 取 り 付 け 部 加 工 |
 |
 |
|
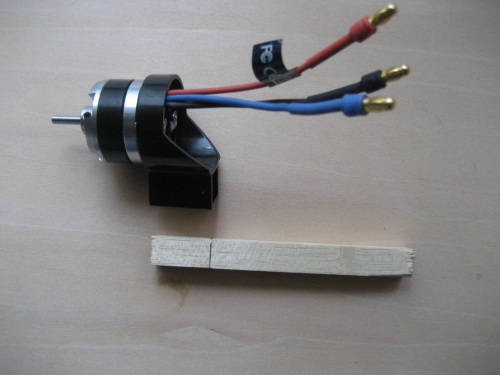
| モーター取付部とマウント用スティック | |||
 |
 |
||
| モーターマウントを奥まで差し込んで、予め印をつけておく。 | 10x10mmひのき角材(長さ79mm)をスティックに接着する (CA) | ||
 |
 |
||
| 穴追加工前 | 焼いたピアノ線等で、スティック取付用穴を追加工する | ||
 |
 |
||
| モーターケーブルを通す穴も追加工する (左図:穴あけ前 右図:穴あけ後) | |||
 |
 |
||
| スティックを接着 (スーパーX、”ねりわさ”、またはキット付属の接着剤) | モーター取付参考画像 | ||
| *** | |||
| エ ル ロ ン ホ | ン の 取 付 |
 |
 |
|
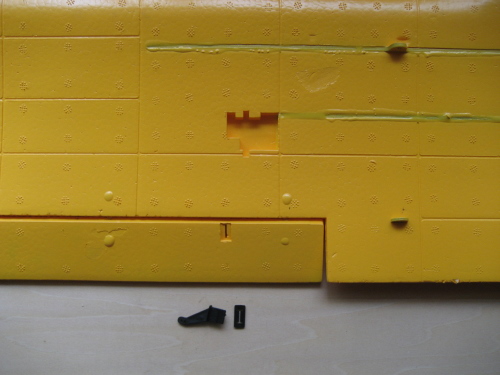
| 左右のエルロンホーンを取り付け(スーパーX、”ねりわさ”またはキット付属の接着剤使用) | |||
 |
 |
||
| 左右のエルロンホーンを取り付け後 (裏面) | |||
 |
 |
||
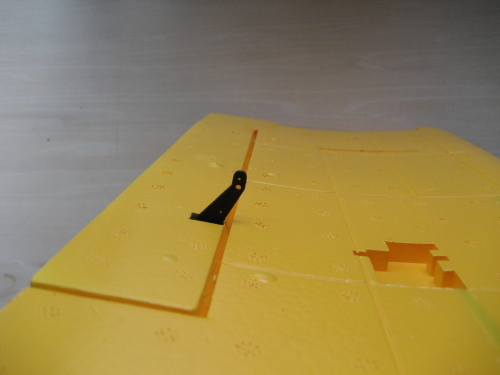
| 左右のエルロンホーンを取り付け後 (表面) | |||
| *** | |||
| ケ | ブ ル 通 し 穴 加 工 |
 |
 |
|
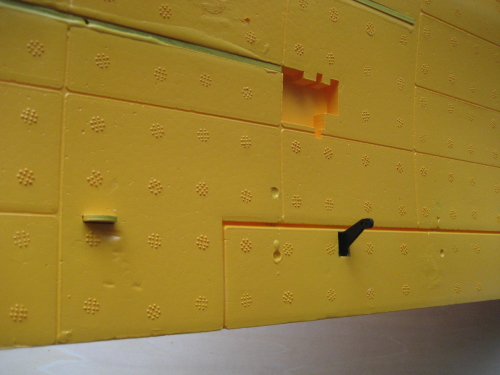
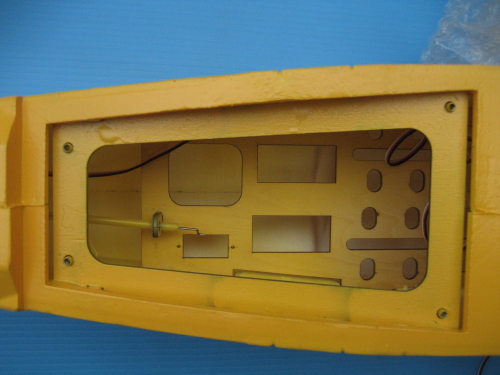
| ケーブル通し穴あける前 | |||
 |
 |
||
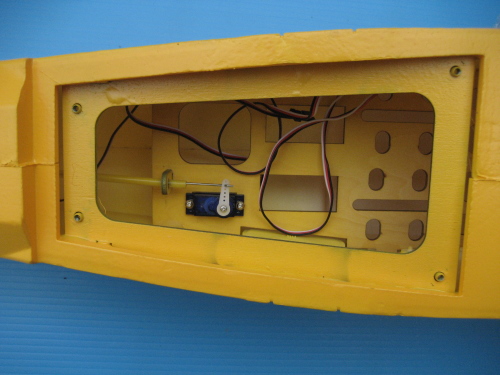
| ケーブル通し穴をあけた後 | |||
| *** | |||
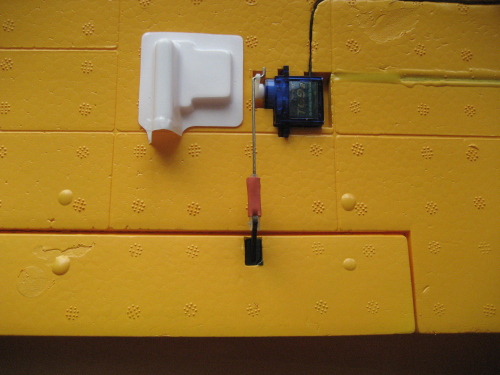
| エ ル ロ ン サ | ボ 取 付 |
 |
 |
|
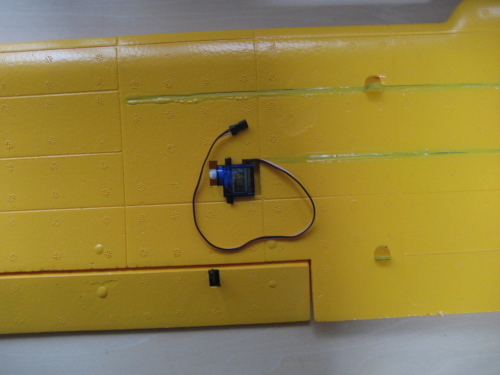
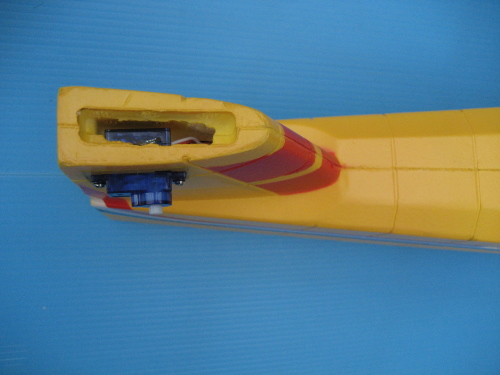
| ・9gサーボを点付け接着 (スーパーX、”ねりわさ”またはキット付属の接着剤使用) <サーボはあらかじめニュートラルを出しておく> |
|||
 |
 |
||
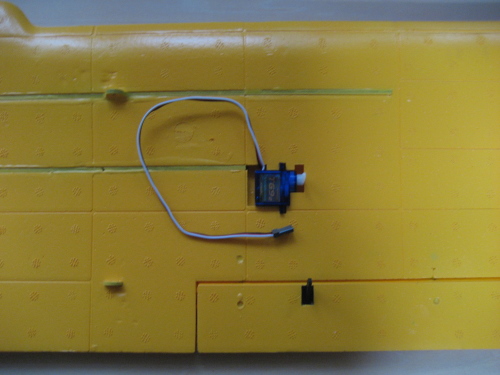
| 主翼下面にカッターナイフ等で少し溝をつけて、サーボケーブルを押し込む <竹串等を使用> |
|||
 |
 |
||
| サーボ延長ケーブル(30cm)と接続して主翼にあけた穴を通す | |||
| ** | |||
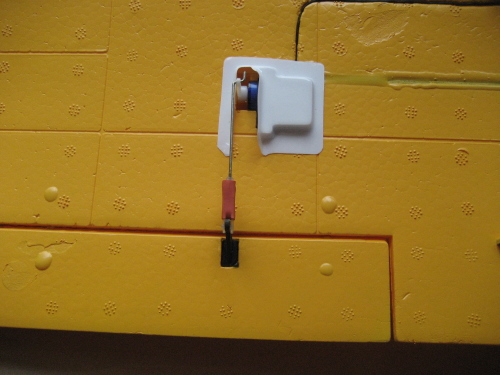
| エ ル ロ ン サ | ボ ・ リ ン ケ | ジ |
 |
 |
|
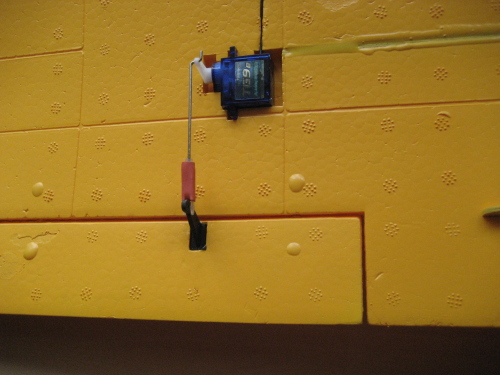
| サーボホーンの穴を少し広げる(φ1.2~φ1.5mm) ※この作業はサーボ単体の時またはホーンを外して作業する |
脱落防止用収縮スリーブ(φ4~φ5mm) | ||
 |
 |
||
| サーボカバーを接着する (サーボホーンと干渉しないようにはさみ等で加工する) | |||
| *** | |||
| モ | タ | 取 付 け 部 接 着 |
 |
 |
|
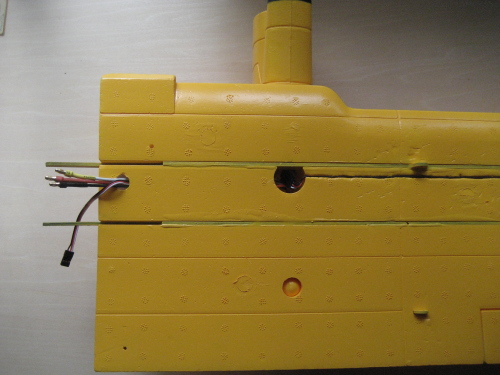
| モーター延長ケーブルを主翼にあけたケーブル通し穴に通す (左図:主翼上面 右図:主翼下面) | |||
 |
 |
||
| モーター延長ケーブルをモーター取付部に通す(左右の主翼共) | 接着する両面に、スーパーX または”ねりわさ”を塗布して数分放置する。 その後、指先にくっつかない程度に乾いたところで接着すると作業が早い。 |
||
 |
 |
||
| 接着剤が乾燥するまで動かないように置いておく | |||
| モ | タ | の 取 付 け |
 |
 |
|
| モーターケーブルと延長ケーブルのコネクターをつなぐ | |||
 |
|||
| 取付ねじ:ステンレス・トラスタッピング 3x8 | |||
| **************** | |||
| 翼 端 板 接 着 |
 |
 |
|
 |
 |
||
| 左右翼端板の接着 (スーパーX、”ねりわさ”、またはキット付属の接着剤で接着) | |||
| ******************* | |||
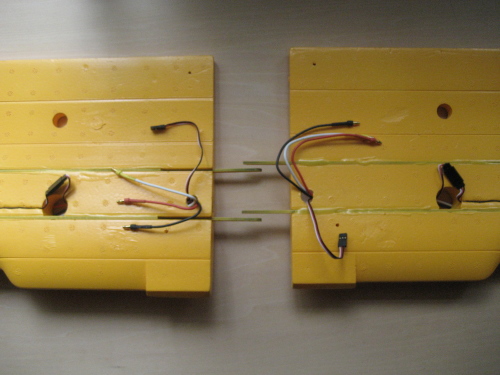
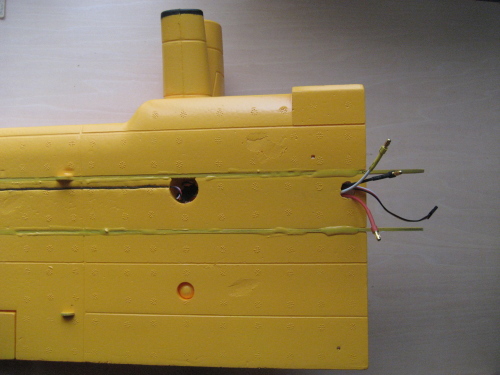
| 左 右 主 翼 の 接 着 |
 |
 |
|
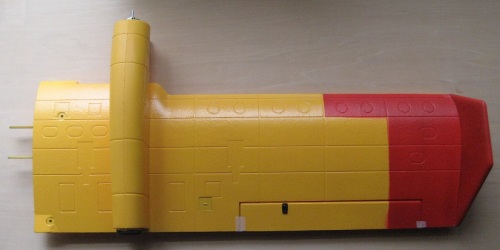
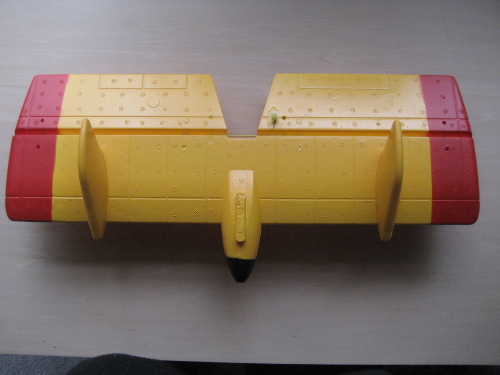
| 左右主翼を準備する | |||
 |
 |
||
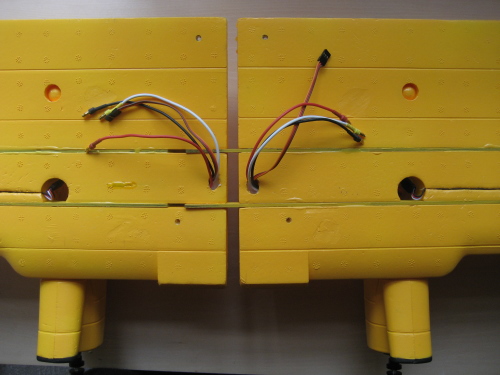
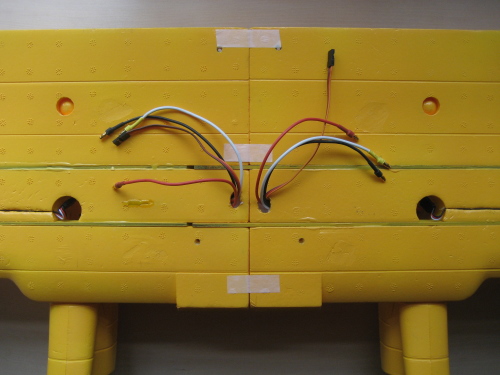
| 接合面の両面ににスーパーX、”ねりわさ”または、キット付属の接着剤を塗布して左右の主翼を接着する | マスキングテープ等で動かないように固定する。 <接着力の強いテープは、塗装が剥離することがあるので要注意> |
||
| 接着剤が固まるまでの間、動かないように固定しておく。 <機体にねじ止めして固定しておく方法もあり> 主翼に下反角または上反角がつかないよに接着剤が硬化するまで水平に保持する。 |
 |
||
| ************* | |||
| 翼 端 フ ロ | ト の 接 着 |
 |
 |
|
| 左右の翼端フロートを接着する (スーパーX、”ねりわさ”、またはキット付属の接着剤を使用) | |||
| ** ★★ 胴体の組立 ★★ ** |
|||
| 水 平 尾 翼 組 立 |
 |
 |
|
| 接合面にスーパーX、”ねりわさ”、またはキット付属の接着剤を塗布して接着する | |||
| ************* | |||
| エ レ ベ | タ サ | ボ 取 付 |
 |
 |
|
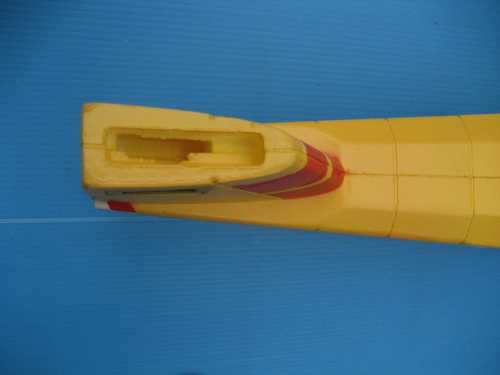
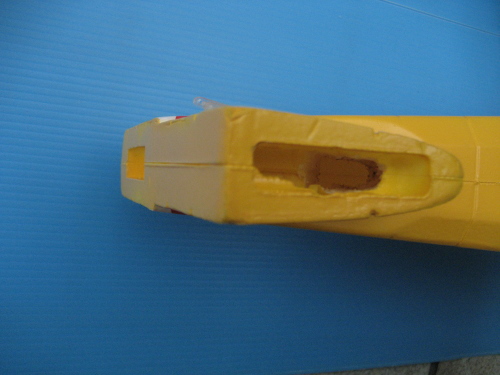
| サーボ延長ケーブル(40cm)通し穴加工 (左図:加工前 右図:加工後) | |||
 |
 |
||
| サーボ延長ケーブルを通す | サーボのケーブルと接続する(抜け止にコネクタキャップ使用) | ||
 |
 |
||
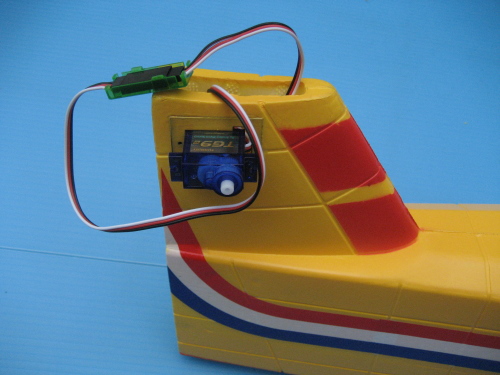
| エレベータサーボ取付状態 | サーボのニュートラルを出してサーボホーンをねじ止めする | ||
| *************** | |||
| ラ ダ | サ | ボ 取 付 |
 |
 |
|
| ラダーサーボ取付前 | ラダーサーボ取付後 ※サーボホーンの動きをスムースにするためロッドは下から通す |
||
| *************** | |||
| 尾 翼 の 接 着 |
   |
||
| 胴体、垂直尾翼および水平尾翼を準備する | |||
 |
 |
||
 |
 |
||
| 接合面の両面にスーパーX 、”ねりわさ”、またはキット付属の接着剤を塗布して水平尾翼を接着する 接着剤がべとつかなくなるまで溶剤を飛ばして接着すると,作業が早くできる。 前後・左右からねじれ/傾きがないかを良くチェックすること |
|||
 |
 |
||
 |
 |
||
| 垂直尾翼接合面の両面にスーパーX、”ねりわさ”またはキット付属の接着剤を塗布して垂直尾翼を接着する。 接着剤がべとつかなくなるまで溶剤を飛ばして接着すると,作業が早くできる。 前後・左右からねじれ/傾きがないかを良くチェックすること |
|||
| *** | |||
エ レ ベ | タ & ラ ダ | リ ン ケ | ジ |
 |
||
| ラダーのリンケージ(抜けど目のために収縮スリーブφ4~φ5mmをかぶせる) | |||
| *** | |||
 |
 エレベータサーボ・ホーンの穴を少し広げる(φ1.2~φ1.5mm) ※この作業はサーボ単体の時またはホーンを外して作業する   |
||
| エレベーターのリンケージ(抜けどめのため収縮スリーブφ4~φ5mmをかぶせる | エレベータ・ロッドが長いので加工する (左図:元の状態 右図:加工後) |
||
| **** | |||
| 水 中 舵 の 取 付 |
 |
 |
|
| 水中舵を取り付ける ※ラダー連動左右モーター制御方式にすれば水中舵は不要になる。 (左右モーター制御方式にするには、送信機はFUTABAの場合 ”FF-9”以上が望ましい。受信機は6ch以上が必要) |
|||
| ****** |
|||
| モ | タ | ・ ア ン プ ・ 受 信 機 等 の 接 続 と 組 込 み |
 |
 |
|
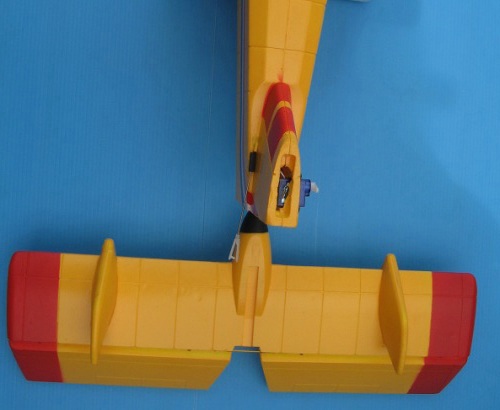
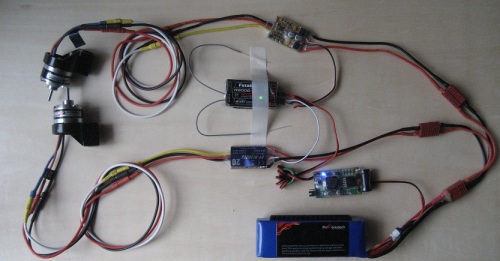
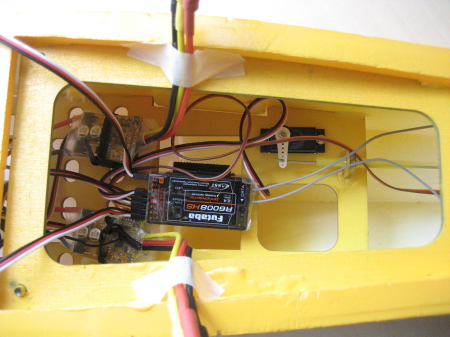
| ケーブルの接続例 | |||
| 4CH受信機の場合 CH1:エルロン(左右エルロンをYケーブルで接続) CH2:エレベーター CH3:スロットル(左右モーター用BECをYケーブルで接続) CH4:ラダー |
7CH受信機の場合 CH1:エルロン右 CH2:エレベーター CH3:BEC CH4:ラダー CH5:モーター右 CH6:モーター左 CH7:エルロン左 ※ラダー連動左右モーターコントロールのミキシングが必要です。 |
||
 |
 |
||
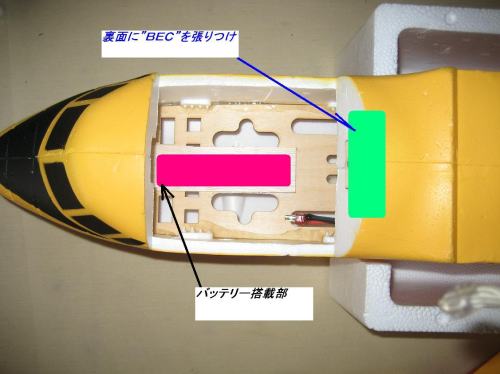
| BEC、バッテリーの取付位置の例 (マジックテープ使用) | プロペラを取り付ける シャフトにねじロック等を塗布して、ゆるみ止めを確実に行う |
||
| *** | |||
| そ の 他 の オ プ シ ョ ン 作 業 |
 |
 |
|
| 浸水防止のため角穴をテープでふさぐ(左右両側) | 滑走を滑らかにするためおよび機体保護のため梱包テープ等で保護する | ||
 |
|||
| 左右両側にタイヤを接着 | |||